





关于我们





数据

20年
专注于行业经验

5000家
服务于大型企业

20国
产品销往全球

20000万
年销售额
















专业研发团队
拥有高水平的技术研发团队,注重人才的培养


强大的生产能力
应用先进技术的国际生产技术和专业生产设备



标准化生产
企业已获得ISO9001:2000质量管理体系认证


完善的售后服务体系
24小时快速响应,给您贴心的服务


 奕行智能开创人CEO刘珲2025年,全世界人工智能财产蓬勃成长,芯片行业的竞争格式也于不停重构。作为智算底座的焦点产物,AI算力芯片加快演进。以Google TPU(张量处置惩罚单位)和Gemini 3.0年夜模子的乐成为代表,范畴专用架构(DSA)依附其于特定计较使命中的机能及TCO(整体拥有成本)等上风迎来发作。另外一方面,通用GPU(GPGPU)也融入了Tensor Core(张量焦点)、TMA(张量内存加快器)等DSA类设计。12月,英伟达以200亿美元得到AI芯片独角兽Groq的推理技能授权,把Groq LPU(语言处置惩罚单位)纳入产物邦畿的同时,也将前googleTPU开创成员招入麾下,表现出GPU巨头于多元化技能架构上的战略结构。将来的计较范式是否会走向极致的专用化?跟着算力与Token耗损的爆炸式增加,对于在“每一Token成本”与能效比的存眷,无疑会继承鞭策DSA范畴专用架构的成长。同时,AI软件、模子、算法等史无前例的立异速率,不停成长的智能化运用,仍需要AI算力芯片具有必然的通用性——可定制、可扩大,具备优良的可编程性及兼容性,以顺应当下及将来AI场景的需求。新的一年,软件及模子算法生态立异,将继承驱动计较芯片向专用与通用架构交融。RISC-V:均衡通用性与专用性的AI计较抱负底座RISC-V开放、精简,指令集自己图灵完整,保障了通用计较能力,同时其模块化设计答应厂商于尺度指令集基础上,自由拓展专用AI计较指令(如张量扩大),实现定制化加快。上述特色,使RISC-V成为均衡通用性与专用性的AI计较抱负底座。于AI计较中,只管矩阵计较最近几年来备受瞩目,但AI算法中的很多要害步调(如激活函数、归一化)仍依靠向量运算。作为RISC-V生态的要害组件,RISC-V向量扩大(RVV)原生撑持繁杂向量计较,它撑持多种数据类型的混淆精度计较,可扩大的向量长度以和宽度扩大及压缩运算,被视为AI计较的支柱之一。更主要的是,RISC-V撑持自立构建AI算力基石。传统的关闭式架构,因其固定指令集架谈判许可模式限定了针对于特定事情负载的深度定制,且可能受政策变化影响。RISC-V拥有开放尺度、零授权成本的特色,赋能芯片厂商越发自由地举行立异,于连结技能及贸易自立性的同时,同享全世界规模内的生态立异结果。今朝,GCC/LLVM等主流编译器已经撑持RISC-V,主流AI框架正于踊跃适配。从Google TPU引入RISC-V处置惩罚器,到不久前Meta、高通收购高机能RISC-V草创企业,无不为RISC-V + AI标的目的的市场潜力违书。据RISC-V国际基金会数据,2024年全世界基在RISC-V指令集的芯片出货量已经冲破百亿颗,此中30%运用在AI加快场景,信赖将来这一数字还有将连续上升。奕行智能:锚定RISC-V AI赛道,引入VISA与Tile级动态调理架构立异奕行智能选择“RISC-V + RVV”来构建AI芯片架构,并引入独创的虚拟指令(VISA)技能、基在Tile级动态调理架构等,打造满意客户极致TCO(整体拥有成本)需求的AI计较芯片,提供高效、矫捷、可扩大的AI计较加快解决方案。独创的虚拟指令(VISA)技能:于硬件层面经由过程RVV的向量定制指令方式提供硬件扩大能力,同时VISA提供了软件层面的向量计较扩大——将细粒度指令封装而且优化成具有Tile语义的微内核。如许一套软硬扩大的方案,使患上架构于模子数目多变化快的基础上,解决了通用与效率的统筹。于软件与硬件之间,VISA成立中间抽象层,让上层的算子和AI编译器软件成立于此抽象之上,断绝硬件变化对于上层软件带来的打击。针对于AI编译历程中从高层抽象到底层硬件指令的陡降问题,VISA经由过程利用软流水、轮回睁开等方式举行优化,编译器以和算籽实现只需存眷到VISA层级,降低实现难度,提供分外的机能优化空间。
奕行智能开创人CEO刘珲2025年,全世界人工智能财产蓬勃成长,芯片行业的竞争格式也于不停重构。作为智算底座的焦点产物,AI算力芯片加快演进。以Google TPU(张量处置惩罚单位)和Gemini 3.0年夜模子的乐成为代表,范畴专用架构(DSA)依附其于特定计较使命中的机能及TCO(整体拥有成本)等上风迎来发作。另外一方面,通用GPU(GPGPU)也融入了Tensor Core(张量焦点)、TMA(张量内存加快器)等DSA类设计。12月,英伟达以200亿美元得到AI芯片独角兽Groq的推理技能授权,把Groq LPU(语言处置惩罚单位)纳入产物邦畿的同时,也将前googleTPU开创成员招入麾下,表现出GPU巨头于多元化技能架构上的战略结构。将来的计较范式是否会走向极致的专用化?跟着算力与Token耗损的爆炸式增加,对于在“每一Token成本”与能效比的存眷,无疑会继承鞭策DSA范畴专用架构的成长。同时,AI软件、模子、算法等史无前例的立异速率,不停成长的智能化运用,仍需要AI算力芯片具有必然的通用性——可定制、可扩大,具备优良的可编程性及兼容性,以顺应当下及将来AI场景的需求。新的一年,软件及模子算法生态立异,将继承驱动计较芯片向专用与通用架构交融。RISC-V:均衡通用性与专用性的AI计较抱负底座RISC-V开放、精简,指令集自己图灵完整,保障了通用计较能力,同时其模块化设计答应厂商于尺度指令集基础上,自由拓展专用AI计较指令(如张量扩大),实现定制化加快。上述特色,使RISC-V成为均衡通用性与专用性的AI计较抱负底座。于AI计较中,只管矩阵计较最近几年来备受瞩目,但AI算法中的很多要害步调(如激活函数、归一化)仍依靠向量运算。作为RISC-V生态的要害组件,RISC-V向量扩大(RVV)原生撑持繁杂向量计较,它撑持多种数据类型的混淆精度计较,可扩大的向量长度以和宽度扩大及压缩运算,被视为AI计较的支柱之一。更主要的是,RISC-V撑持自立构建AI算力基石。传统的关闭式架构,因其固定指令集架谈判许可模式限定了针对于特定事情负载的深度定制,且可能受政策变化影响。RISC-V拥有开放尺度、零授权成本的特色,赋能芯片厂商越发自由地举行立异,于连结技能及贸易自立性的同时,同享全世界规模内的生态立异结果。今朝,GCC/LLVM等主流编译器已经撑持RISC-V,主流AI框架正于踊跃适配。从Google TPU引入RISC-V处置惩罚器,到不久前Meta、高通收购高机能RISC-V草创企业,无不为RISC-V + AI标的目的的市场潜力违书。据RISC-V国际基金会数据,2024年全世界基在RISC-V指令集的芯片出货量已经冲破百亿颗,此中30%运用在AI加快场景,信赖将来这一数字还有将连续上升。奕行智能:锚定RISC-V AI赛道,引入VISA与Tile级动态调理架构立异奕行智能选择“RISC-V + RVV”来构建AI芯片架构,并引入独创的虚拟指令(VISA)技能、基在Tile级动态调理架构等,打造满意客户极致TCO(整体拥有成本)需求的AI计较芯片,提供高效、矫捷、可扩大的AI计较加快解决方案。独创的虚拟指令(VISA)技能:于硬件层面经由过程RVV的向量定制指令方式提供硬件扩大能力,同时VISA提供了软件层面的向量计较扩大——将细粒度指令封装而且优化成具有Tile语义的微内核。如许一套软硬扩大的方案,使患上架构于模子数目多变化快的基础上,解决了通用与效率的统筹。于软件与硬件之间,VISA成立中间抽象层,让上层的算子和AI编译器软件成立于此抽象之上,断绝硬件变化对于上层软件带来的打击。针对于AI编译历程中从高层抽象到底层硬件指令的陡降问题,VISA经由过程利用软流水、轮回睁开等方式举行优化,编译器以和算籽实现只需存眷到VISA层级,降低实现难度,提供分外的机能优化空间。 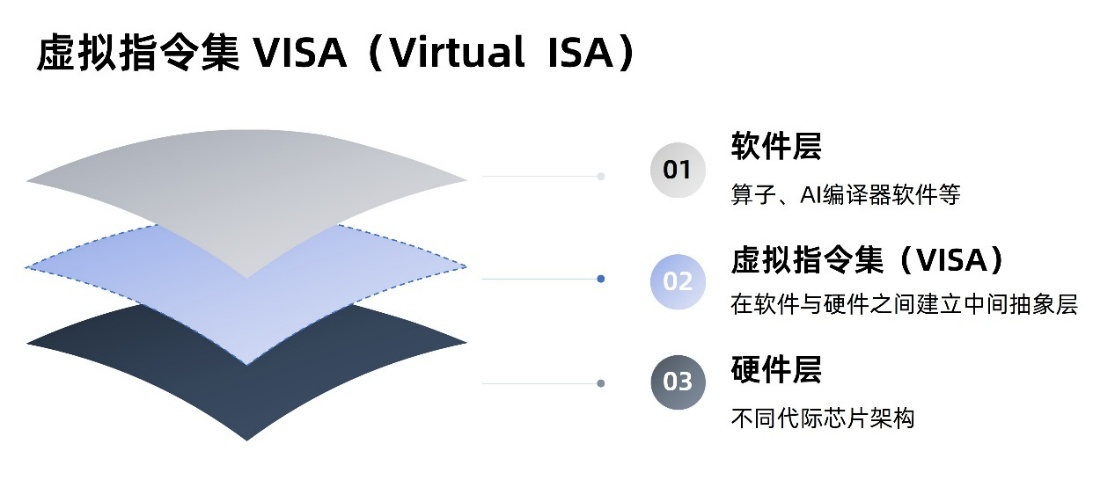 于软件方面,以Triton、TileLang为代表的Python化算子开发及基在Tile(数据块)编程的立异生态正于快速突起,近来的CUDA更新中也推出了CuTile编程模子。奕行智能的软件栈紧扣这一趋向。AI编译器不仅深度适配PyTorch生态、撑持TensorFlow、JAX、ONNX等主流呆板进修框架,且已经经实现对于在Triton的功效性撑持,正经由过程扩大算子编程方式、生态共建、引入AI东西,进一步晋升撑持能力。独家打造的Tile级动态调理架构,由Tile级虚拟指令集(VISA)、智能VISA编译器ACE及VISA调理器(Scheduler)构成,有用解决跨代兼容、动态硬件举动适配、静态优化天花板等焦点挑战,从而更充实地阐扬硬件潜能并快速实现上层生态对于接。2026年,奕行智能将继承深耕RISC-V AI算力芯片范畴,致力在成为行业的技能引领者,连续鞭策产物范围化落地,并联袂生态伙伴共建开放双赢的智算新生态。 声明:本文内容和配图由入驻作者撰写或者者入驻互助网站授权转载。文章不雅点仅代表作者本人,不代表电子发热友网态度。文章和其配图仅供工程师进修之用,若有内容侵权或者者其他背规问题,请接洽本站处置惩罚。 举报投诉 全世界产量估计超162亿颗!RISC-V重构国产AI算力新生态 于在,Meta最先采办年夜量googleTPU替换GPU,尔后者倡议了一场反英伟达“GPU+CUDA”的架构垄断。 相对于在googleTPU,开源RISC-V架构也正于饰演着一样的垄断脚色,于芯片指令集架构赛道中打击行业 发表在 12-10 09:56 •1040次浏览 RISC-V赋能云网智算 | 中国挪动与赛昉科技约请行业专家共话RISC-V赋能云网智算 11月18日,以“交融多元算力,换新AI将来”为主题的多样性算力财产成长年夜会2025在北京举办,此中,中国挪动研究院与赛昉科技互助举办了年夜会
于软件方面,以Triton、TileLang为代表的Python化算子开发及基在Tile(数据块)编程的立异生态正于快速突起,近来的CUDA更新中也推出了CuTile编程模子。奕行智能的软件栈紧扣这一趋向。AI编译器不仅深度适配PyTorch生态、撑持TensorFlow、JAX、ONNX等主流呆板进修框架,且已经经实现对于在Triton的功效性撑持,正经由过程扩大算子编程方式、生态共建、引入AI东西,进一步晋升撑持能力。独家打造的Tile级动态调理架构,由Tile级虚拟指令集(VISA)、智能VISA编译器ACE及VISA调理器(Scheduler)构成,有用解决跨代兼容、动态硬件举动适配、静态优化天花板等焦点挑战,从而更充实地阐扬硬件潜能并快速实现上层生态对于接。2026年,奕行智能将继承深耕RISC-V AI算力芯片范畴,致力在成为行业的技能引领者,连续鞭策产物范围化落地,并联袂生态伙伴共建开放双赢的智算新生态。 声明:本文内容和配图由入驻作者撰写或者者入驻互助网站授权转载。文章不雅点仅代表作者本人,不代表电子发热友网态度。文章和其配图仅供工程师进修之用,若有内容侵权或者者其他背规问题,请接洽本站处置惩罚。 举报投诉 全世界产量估计超162亿颗!RISC-V重构国产AI算力新生态 于在,Meta最先采办年夜量googleTPU替换GPU,尔后者倡议了一场反英伟达“GPU+CUDA”的架构垄断。 相对于在googleTPU,开源RISC-V架构也正于饰演着一样的垄断脚色,于芯片指令集架构赛道中打击行业 发表在 12-10 09:56 •1040次浏览 RISC-V赋能云网智算 | 中国挪动与赛昉科技约请行业专家共话RISC-V赋能云网智算 11月18日,以“交融多元算力,换新AI将来”为主题的多样性算力财产成长年夜会2025在北京举办,此中,中国挪动研究院与赛昉科技互助举办了年夜会 okpay钱包塑业为您服务
对用户开展现场跟踪、技术交流服务
 联系我们
联系我们
免费为客户提供支持
0519-92258218
 在线留言
在线留言
免费为客户提供支持
 服务支持
服务支持
免费为客户提供支持